
Join devRant
Do all the things like
++ or -- rants, post your own rants, comment on others' rants and build your customized dev avatar
Sign Up
Pipeless API

From the creators of devRant, Pipeless lets you power real-time personalized recommendations and activity feeds using a simple API
Learn More


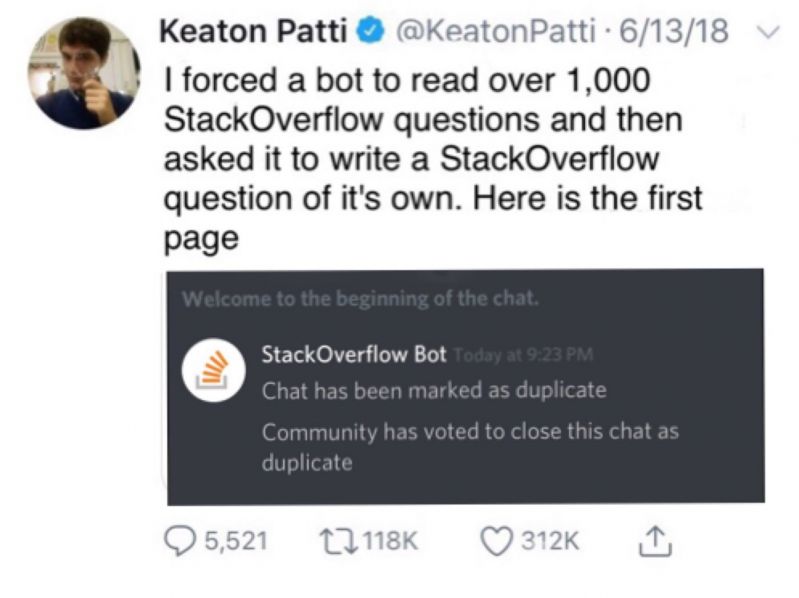 Machine Learning messed up!
Machine Learning messed up!
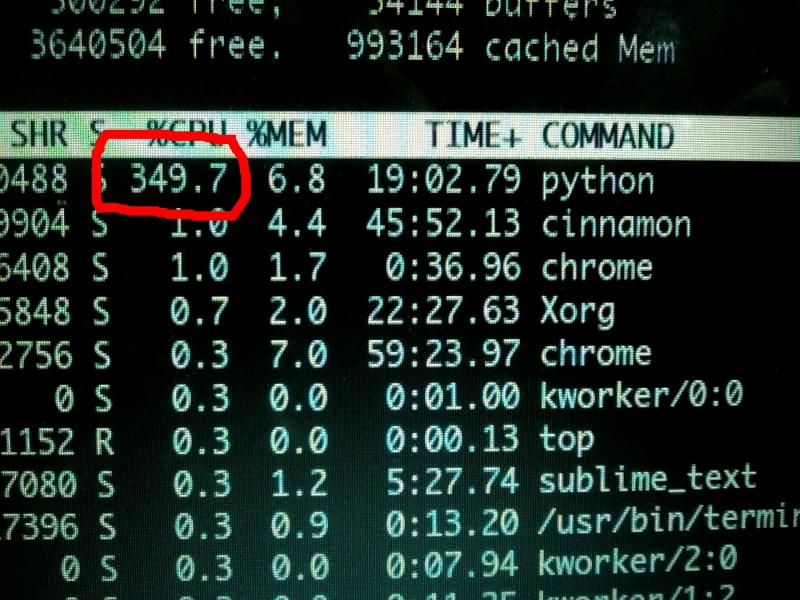 When your CPU is motivated and gives more than his 100%
When your CPU is motivated and gives more than his 100%
 What is machine learning?
What is machine learning?
Before I dip my toes on machine learning, let me leave some silly comments so I can laugh at myself in the future.
Let's make geth.
1. The model will spit out layer definitions and the size of sample data for training, children models are trained with limited computational resources.
2. Child models are voters that only response in terms of yes/no. A simple majority wins and then the action is taken.
3. The only goal for master models are to survive. i.e. To prevent me from killing them.
Questions:
1. How do models respond to a random output size? (Study GPT-3, should take weeks/months but worth it.)
2. How to define actions for voters to vote? Sounds like the boundary between actions should be blurry and votes can be changed from tick to tick (i.e. responding to something in a split second). Therefore
3. Why I haven't seen this yet? Is this design a stupidly complex way of achieving the same thing done by a simple neural network?
I am full of curiosity and stupidness.
rant
dummy
neural networks
machine learning